Sobald man den kleinen Motor von Walfront in der Hand hält, stellt sich automatisch die Frage, über wie viel Kraft er wohl
verfügt? Der Mini-Motor hat bei einem Durchmesser von 15 mm eine Höhe von gerade 10 mm.
Das folgende Experiment benennen wir mit „Lastenaufzug“ und testen einfach, welche Gewichte, wenn überhaupt, dieser Motor in
Bewegung bringen kann. Der Motor ist an einer Trägerschiene montiert. Dank zwei Führungsachsen und einer Spindel kann er an einer Strecke
von ca. 90 mm linear einen Kunststoffträger bewegen. Wir positionieren das Gestell senkrecht und verwandeln die ganze Komposition in eine Art
Aufzug, der rauf und runter bewegt werden kann.
Schrittmotor D8-MOTOR80
Auf dem Träger wird eine kleine Plattform befestigt, auf der in einer selbst gemachten Schale Gewichte untergebracht
werden können.
Versuchsanordnung
Bei dem Motor (Modell D8-MOTOR80) handelt es sich um einen 2-phasigen Schrittmotor, der mit 9-12 V eingespeist werden kann.
Seine Stromaufnahme pro Wicklung liegt bei 800 mA. Der Wicklungswiderstand beträgt ca. 15 Ohm. Bei einem Schritt bewegt sich der Motor um 18°.
Die maximale lineare Geschwindigkeit liegt bei 25 mm pro Sekunde.
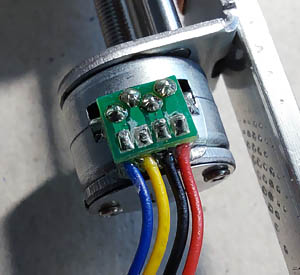
Motor-Anschlüsse
HR4988
Zusätzlich kommt in der Schaltung ein Treiber-Modul mit dem Chip A4988 zum Einsatz. Das Modul beschränkt die Anzahl der
benötigten Pins des Arduino (in dieser Anwendung) auf zwei. Mit einer Leitung (Eingang STEP) wird die Geschwindigkeit gesteuert, mit der
anderen die Drehrichtung (Eingang DIRECTION). An die Anschlüsse 1A, 1B, 2A und 2B wird der Motor angeschlossen. Der Treiber wird an zwei
Stellen eingespeist. Er benötigt 5 V für die Steuerungselektronik. Zusätzlich wird eine Spannung (Motorspannung) von 8 bis 35 V für den
Motor benötigt (in diesem Fall 12V). Um Störungen zu vermeiden, wird hier ergänzend ein Kondensator angeschlossen. Mithilfe der Eingänge
MS1 bis MS3 können fünf verschieden Auflösungen eingestellt werden. In dem Beispiel werden die Eingänge nicht verwendet. Pro Kanal kann
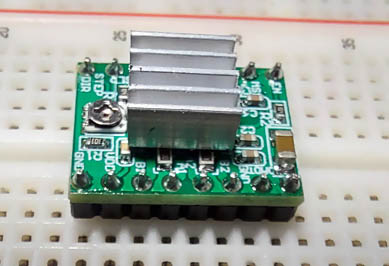
das Modul bis 1A an Strom liefern. Damit es zu keiner Überhitzung kommt, wird an den Hauptchip ein kleiner Kühlkörper
aufgesetzt.
Treiber HR4988 mit Kuehlkoerper
Auf dem Treiber-Modul befindet sich ein kleines Potenziometer, mit dem man den Strom einstellen kann. Mit der Einstellung
wird der Strom, den der Motor laut Datenblatt aufnimmt, eingestellt. Für diese Einstellung wird ein Amperemeter benötigt. Man schließt
den Motor an das Modul an und setzt eine Wicklung unter Spannung. Der Amperemeter in Reihe mit der Wicklung angeschlossen. Dabei wird
der STEP-Eingang konstant an 5V angeschlossen. Mit dem Potentiometer wird jetzt der gewünschte Strom
eingestellt.
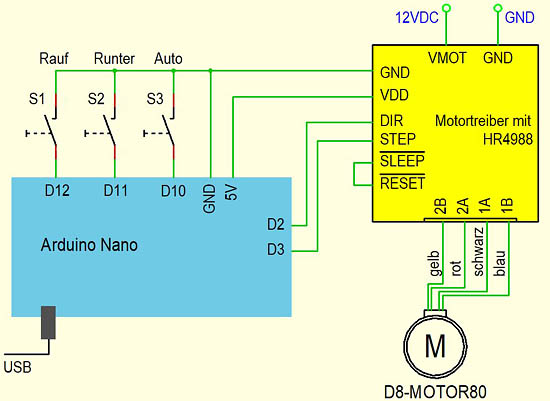
Der Schaltplan
Der Schaltplan
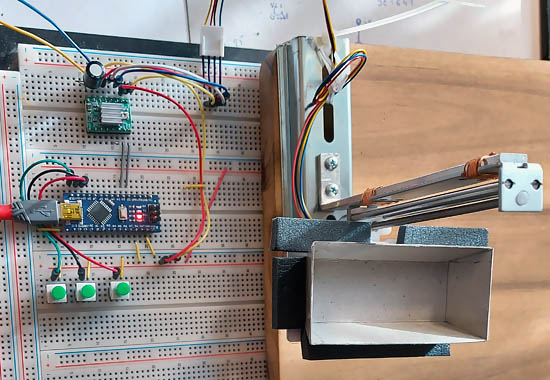
Die Testschaltung
Testschaltung
Das Programm (Sketch)
// *****************************************************************************
// Lastenaufzug
// D8-MOTOR80 / Treiber-Modul mit HR4988
// Arduino Nano, IDE 1.8.13
// *****************************************************************************
int PUL = 3; // Pulse
int DIR = 2; // Drehrichtung
int Taster_Hand_Rauf = 12;
int Taster_Hand_Runter = 11;
int Schalter_Automatik = 10;
int i;
void setup() {
pinMode (PUL, OUTPUT);
pinMode (DIR, OUTPUT);
pinMode (Taster_Hand_Rauf, INPUT_PULLUP);
pinMode (Taster_Hand_Runter, INPUT_PULLUP);
pinMode (Schalter_Automatik, INPUT_PULLUP);
}
void Motor_drehen (int Schritte, int Pulslaenge, int Richtung, int Geschwindigkeit) {
if (Richtung) { digitalWrite(DIR,HIGH); }
else
{ digitalWrite(DIR,LOW); }
for (i = 0; i < Schritte; i++) {
digitalWrite(PUL,HIGH);
delayMicroseconds(Pulslaenge);
digitalWrite(PUL,LOW);
delayMicroseconds(Geschwindigkeit); }
}
void loop() {
// Automatik
if (digitalRead(Schalter_Automatik) == LOW) {
Motor_drehen (2000, 500, HIGH, 500);
delay (500);
Motor_drehen (2000, 500, LOW, 500);
delay (500);
}
// Handbetrieb Rauf
if (digitalRead(Taster_Hand_Rauf) == LOW) {
Motor_drehen (1, 500, HIGH, 500);
}
// Handbetrieb Runter
if (digitalRead(Taster_Hand_Runter) == LOW) {
Motor_drehen (1, 500, LOW, 500);
}
}
// *****************************************************************************
Während des Tests wurde der Mini-Lasten-Aufzug nach und nach mit immer mehr Gewichten belastet. Und lieferte ausgezeichnete
Arbeit. Zum Schluss schaffte er ein aus Schrauben und Muttern bestehendes gesamt Gewicht von über 300 Gramm rauf und runter zu transportieren.
Beeindruckend.