
| Sonnenanbeter
|





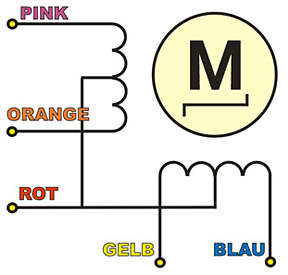
Motortreiber-Modul mit ULN2003A

Zwischen dem Motor und Arduino wird ein Motortreiber zwischengeschaltet. Das ist notwendig, da die Arduino-Ausgänge nur begrenzt belastet werden können. Bei dem Treiber handelt es sich um ein fertiges Modul, das auf dem IC ULN2003A basiert. Der Baustein verfügt über sieben Kanäle und kann pro Kanal mit 500 mA belastet werden.
ULN2003AArduino Uno

Die Messung der Spannungen an den Spannungsteilern und ihre Auswertung erledigt Arduino Uno. In der Schaltung werden sieben digitale I/Os und zwei analoge Eingänge des Mikrocontrollers in Anspruch genommen. Das bedeutet, dass noch viele freie Pins für eventuelle Erweiterungen zur Verfügung stehen.
Arduino
Der Schaltplan
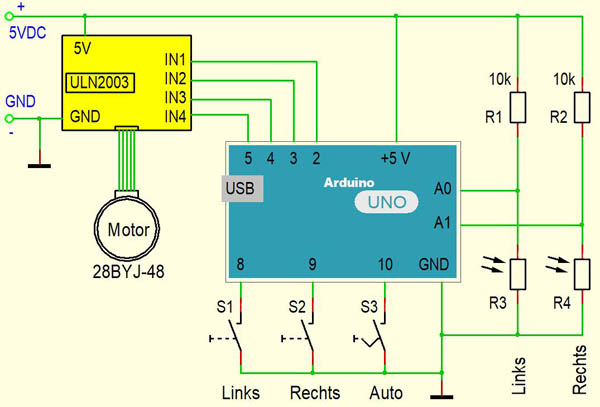
Der Schaltplan
Die Testschaltung
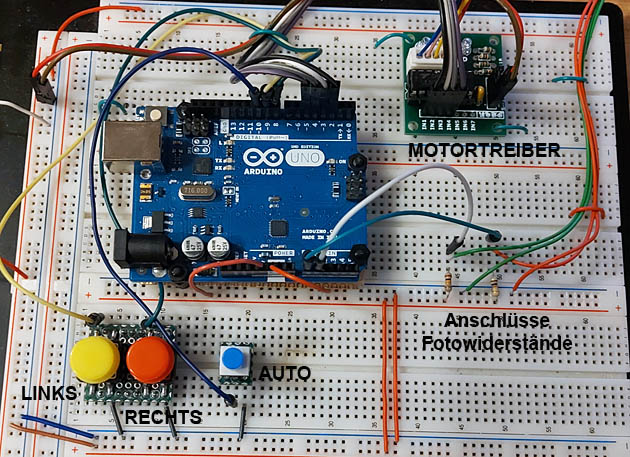
Testschaltung
Das Programm
// ************************************************************************************// Sonnenanbeter
// Schaltung mit Arduino UNO, Schrittmotor 28BYJ-48, Motortreiber ULN2003
// und zwei Fotowiderständen
// Arduino UNO
// IDE 1.8.19
// ************************************************************************************
#include <Stepper.h> // Bibliothek einbinden int Schritte_pro_Umdrehung = 1024; Stepper myStepper(Schritte_pro_Umdrehung, 2, 4, 3, 5); int Taster_Manuell_Links = 8; // Manuelle Steuerung LINKS int Taster_Manuell_Rechts = 9; // Manuelle Steuerung RECHTS int Schalter_Automatik = 10; // Schalter für Automatik int Fotowiderstand_Rechts; // Helligkeitsmessung LINKS int Fotowiderstand_Links; // Helligkeutsmessung RECHTS int Wert_Analog; // Analogeingang auslesen int Abweichung = 0; // Hysterese void setup() { pinMode (Taster_Manuell_Links, INPUT_PULLUP); // Taster Bewegung LINKS pinMode (Taster_Manuell_Rechts, INPUT_PULLUP); // Taster Bewegung RECHTS pinMode (Schalter_Automatik, INPUT_PULLUP); // Umschaltung auf AUTO } void loop() { // HAUPTPROGRAMM .............................. Fotowiderstand_Links = 0; // Analoger Eingang wird for (int i = 0; i < 10; i++) { // 10 Mal ausgelesen Wert_Analog = analogRead (A1); Fotowiderstand_Links = Fotowiderstand_Links + Wert_Analog; } Fotowiderstand_Links = Fotowiderstand_Links / 10; // Mittelwert Fotowiderstand_Rechts = 0; // wie oben for (int i = 0; i < 10; i++) { Wert_Analog = analogRead (A0); Fotowiderstand_Rechts = Fotowiderstand_Rechts + Wert_Analog; } Fotowiderstand_Rechts = Fotowiderstand_Rechts / 10; if (digitalRead(Schalter_Automatik) == LOW) { // Automatik aktiviert // Bewegung LINKS if (Fotowiderstand_Links > (Fotowiderstand_Rechts + Abweichung)) { myStepper.setSpeed(5); myStepper.step(-1); Abweichung = 0; } // Bewegung RECHTS if (Fotowiderstand_Rechts > (Fotowiderstand_Links + Abweichung)) { myStepper.setSpeed(5); myStepper.step(1); Abweichung = 0; } } // Ziel erreicht if (Fotowiderstand_Links == Fotowiderstand_Rechts) { Abweichung = 20; } // Hand Betrieb - Manuell LINKS drehen ........... if (digitalRead(Taster_Manuell_Links) == LOW) { myStepper.setSpeed(10); myStepper.step(-1); Abweichung = 0;} // Abweichung für AUTO nullen // Hand Betrieb - Manuell RECHTS drehen .......... if (digitalRead(Taster_Manuell_Rechts) == LOW) { myStepper.setSpeed(10); myStepper.step(1); Abweichung = 0;} // Abweichung für AUTO nullen }
Kurzvideo zur Schaltung
Kurzvideo
Weitere Themen:
Google-Suche auf MEINE-SCHALTUNG.de : |