
| Positionierungmit Baumer-Inkrementalgeber und ArduinoMit der folgenden Schaltung werden wir mithilfe eines Inkrementalgebers eine Achse absolut positionieren. Für eine solche
Aufgabe wäre ein Absolut-Inkrementalgeber eine bessere Wahl. Bei diesen Gebern kann man die aktuelle Position direkt nach dem Einschalten
ermitteln. Beim Positionieren mit einem Inkrementalgeber muss, bevor man automatische Abläufe einleitet, zunächst referenziert werden. Man
fährt eine feste und bekannte Position an und nullt den Zähler.
 Motor und Geber startbereit. Die Schaltung arbeitet mit zwei Geschwindigkeiten. Die Hauptbewegung des Motors erfolgt mit einer höheren Geschwindigkeit.
Erst kurz vor dem Ziel wird auf eine niedrigere Positionierungsgeschwindigkeit umgeschaltet. So kann man „genauer“ das Ziel erreichen.
Ist die Geschwindigkeit zu hoch, schießt man übers Ziel hinaus. Eine dann erforderliche Rückwärtsbewegung ist meistens unerwünscht und
kostet Zeit. In den industriellen Anlagen wird die Geschwindigkeit des Motors kurz vor dem Ziel, entsprechend der eingestellten Rampe,
sukzessiv heruntergefahren, bis der Antrieb im Ziel zum Stillstand kommt (Servoantriebe).
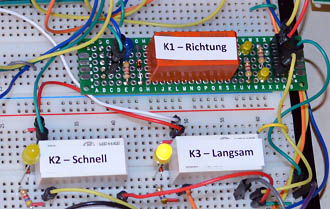 Motor - Steuerrelais In der Schaltung werden drei Taster verwendet. Mit S1 kann die Achse auf die gewünschte Position, die anschließend als Ziel definiert werden kann, gebracht werden. Dies geschieht mit dem Taster S3 (Reset). Mit dem Taster S2 (Automatik Ein / Aus) wird der automatische Ablauf gestartet. 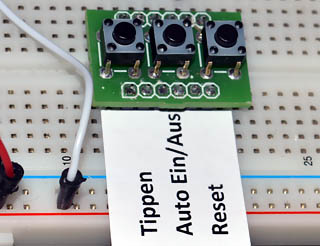 Taster Tippen, Auto und Reset Bei dem Geber handelt es sich um einen Inkrementalgeber von Baumer mit der Bezeichnung BDK 16.24.K500. Er wird mit 24VDC betrieben. Da die Spannung für Arduino zu hoch ist, werden die 24V – Signale mit einfachen Spannungsteilern auf ca. 5V runtergesetzt. Der Geber liefert 500 Inkremente pro Umdrehung. Es stehen drei Spuren zur Verfügung: A,B und N. Das Referenzsignal N wird in diesem Versuch nicht ausgewertet.  Baumer-Geber Die Koordination aller Elemente übernimmt Arduino Mega 2560. 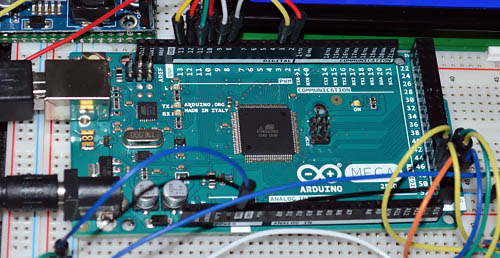 Arduino Der Schaltplan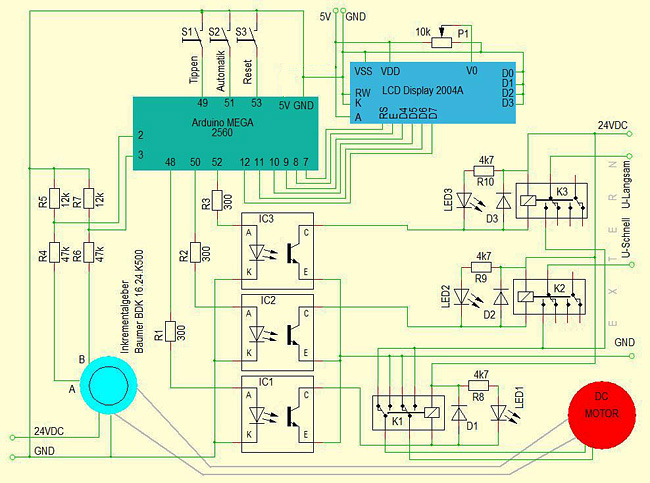 Schaltplan: Positionierung mit Baumer Inkrementalgeber. (Arduino ohne USB-Anschluss oder Netzteil: Vin > 6 V) Aufgebaute Testschaltung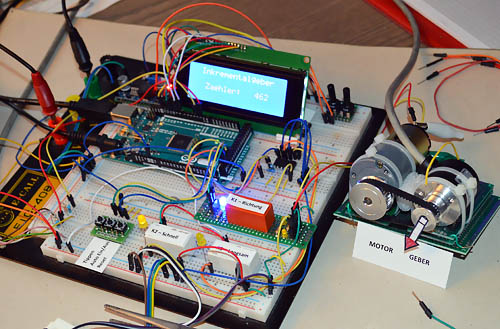 Aufgebaute Testschaltung Das ProgrammIn dem Programm dreht sich alles um Inkremente. Um die Inkremente zählen zu können, wird mit dem Aufruf:
// Inkrementalgeber // Arduino Mega 2560 R3 // Inkrementalgeber Baumer (500 Inkremente / U) // ******************************************************************* #include <LiquidCrystal.h> LiquidCrystal lcd(8, 9, 10, 11, 12, 13); int PinA = 2; // Inerrupt-Pin int PinB = 3; int TA_Tipp = 49; // Taster Tippen int TA_Auto = 51; // Taster Automatik Ein / Aus int TA_Reset = 53; // Taster Zähler nullen int K1_Richtung_Um = 48; // Relais K1 Richtung ändern int K2_Schnell = 50; // Relais K2 schnell drehen int K3_Langsam = 52; // Relais K3 langsam drehen int Zaehler = 0; // Inkremente Ist-Zahl bool Auto = false; bool AutoM = false; int Schritt; unsigned long MillisAktuell = 0; // Verzögerungszeiten unsigned long Wartezeit = 1000; unsigned long ZeitStart = 0; unsigned long DisplayZeit = 0; // SetUp ------------------------------------------------------------- void setup() { pinMode (PinA, INPUT); pinMode (PinB, INPUT); attachInterrupt(digitalPinToInterrupt(PinA), Inkremente, CHANGE); pinMode (TA_Tipp, INPUT_PULLUP); pinMode (TA_Auto, INPUT_PULLUP); pinMode (TA_Reset, INPUT_PULLUP); pinMode (K1_Richtung_Um, OUTPUT); pinMode (K2_Schnell, OUTPUT); pinMode (K3_Langsam, OUTPUT); } // Interrupt - Programm (Inkremente erfassen und zählen) ------------- void Inkremente () { bool WertA = digitalRead(PinA); bool WertB = digitalRead(PinB); if (WertA==true && WertB==false || WertA==false && WertB==true){ Zaehler++; } if (WertA==false && WertB==false || WertA==true&& WertB==true){ Zaehler--; } } // Anzeige aktualisieren --------------------------------------------- void LCD_Display () { DisplayZeit = MillisAktuell; lcd.begin(20,4); lcd.setCursor(2, 0); lcd.print ("Inkrementalgeber"); lcd.setCursor(3, 2); lcd.print ("Zaehler: "); char buffer[5]; sprintf(buffer,"%5i",Zaehler); lcd.print (buffer); } // Hauptprogramm ----------------------------------------------------- void loop() { MillisAktuell = millis(); if (MillisAktuell > DisplayZeit + 300) { LCD_Display (); } // Tippen ---------------------------------------------------------- if (not Auto) { if (digitalRead(TA_Tipp) == LOW) { digitalWrite(K3_Langsam,HIGH); } else { digitalWrite(K3_Langsam,LOW); } } // Zähler nullen --------------------------------------------------- if (digitalRead(TA_Reset) == LOW) { Zaehler = 0; } // Auto Ein / Aus -------------------------------------------------- if (digitalRead(TA_Auto) == HIGH) { AutoM = true; } if (digitalRead(TA_Auto) == LOW && AutoM == true ) { Auto = not Auto; AutoM = false; if (Auto) { Schritt = 1; } if (not Auto) { digitalWrite(K1_Richtung_Um,LOW); digitalWrite(K2_Schnell,LOW); digitalWrite(K3_Langsam,LOW);} } // Automatischer Ablauf -------------------------------------------- if (Auto) { switch (Schritt) { case 1: digitalWrite(K2_Schnell,HIGH); if (Zaehler >= 900) { Schritt = 2; } break; case 2: digitalWrite(K2_Schnell,LOW); digitalWrite(K3_Langsam,HIGH); if (Zaehler >= 1000) { Schritt = 3; } break; case 3: digitalWrite(K3_Langsam,LOW); ZeitStart = MillisAktuell; Schritt = 4; break; case 4: if (MillisAktuell > ZeitStart + Wartezeit) { Schritt = 5; } break; case 5: digitalWrite(K2_Schnell,HIGH); digitalWrite(K1_Richtung_Um,HIGH); if (Zaehler <= 100) { Schritt = 6; } break; case 6: digitalWrite(K2_Schnell,LOW); digitalWrite(K3_Langsam,HIGH); if (Zaehler <= 0) { Schritt = 7; } break; case 7: digitalWrite(K3_Langsam,LOW); digitalWrite(K1_Richtung_Um,LOW); ZeitStart = MillisAktuell; Schritt = 8; break; case 8: if (MillisAktuell > ZeitStart + Wartezeit) { Schritt = 1; } break; } } } // *************************************************************
|


Google-Suche auf MEINE-SCHALTUNG.de : |